Köszöntjük a kutatócsoport megújult honlapján!
A kutatócsoport régi honlapja itt elérhető.
Kutatási koncepció
A 2017-től 2022-ig terjedő időszakban kutatócsoportunk a járműdinamika alapkutatási problémáira fókuszál, ezen a területen nemzetközi szintű eredményeket értünk el a korábbi években. Két olyan téma kerül előtérbe, melyek iránt mind az ipar, mind a tudományos közösség részéről kitüntetett érdeklődést tapasztaltunk: a dinamikai érintkezési feladatok és az alulaktuált mechanikai rendszerek vizsgálata.
Egyre nagyobb az igény a mechanikai érintkezés és súrlódás megbízható modellezésére, mert e nélkül nem lehetséges a szerkezetek pontos modális analízise és stabilitásvizsgálata. Már a merev testek között ható Coulomb-súrlódás is sok matematikai nehézséget vet fel, például egyes esetekben elvileg eldönthetetlen, hogy megcsúszás vagy letapadás következik-e be. Munkatársaink megoldást találtak erre a problémára; az elmélet kidolgozása az induló pályázati ciklus feladata. A módszer ígéretes alkalmazási területe a kerekek gördülésének vizsgálata. Ha a kerék rugalmas, a kerék-talaj érintkezési tartományban változó mintázatú tapadó és csúszó zónák jönnek létre. Ennek figyelembevételével célunk a kerék-talaj kapcsolat pontosabb modelljeinek kidolgozása és azok alkalmazása járműszerelvények stabilitásvizsgálatában.
Kutatócsoportunkban számos módszert fejlesztettek ki alulaktuált robotok tervezésére és elemzésére, melyek szabadsági fokánál kevesebb beavatkozó szerv áll rendelkezésre. A következő időszakban ezeket a módszereket tervezzük alkalmazni más területeken is.
A közúti járművek alulaktuált jellege szembetűnő például járműszerelvények tolatása során. Célunk szabályozó algoritmusok fejlesztése erre az esetre, a kerék gördülés vizsgálati eredményeinek felhasználásával. A matematikai eszköztár azonossága miatt módszereink a mobil robotok és az emberi járás/futás vizsgálata kapcsán is alkalmazhatók. A számítógépes szabályozások megvalósítása során figyelmet szentelünk a digitális hatásoknak, azok ugyanis ronthatják a dinamikai tulajdonságokat.
Az elméleti vizsgálatok mellett fontos cél a modellek kísérleti ellenőrzése és gyakorlati alkalmazási lehetőségek kidolgozása.
Passzív lépegető rendszerek és az emberi járás vizsgálata
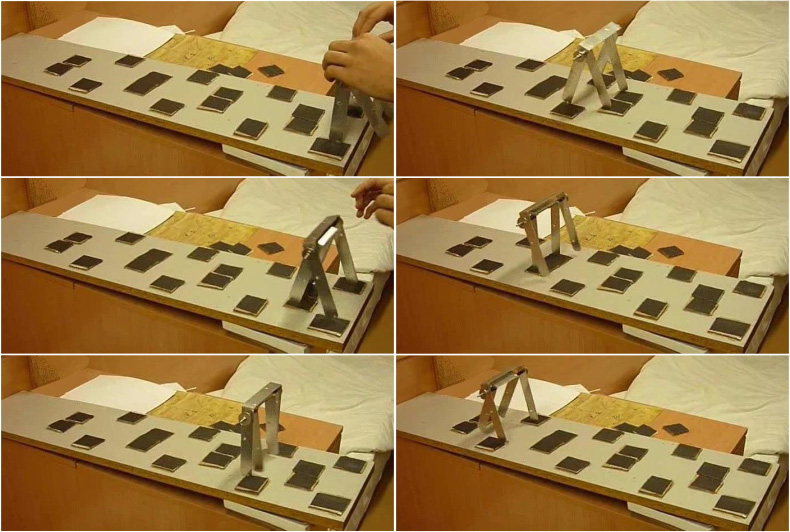
A többtest-dinamika és az alulaktuált rendszerek területén szerzett ismereteket az emberi járás és futás biomechanikai vizsgálatánál is felhasználták a kutatócsoport tagjai. Az emberi járás jelentős részben passzív. Megfigyelhetjük, hogy lábunk minden lépésünknél az izmok beavatkozása nélkül lendül előre előkészítve ezzel a következő lépést. Kutatócsoportunk tagjai a passzív járás vizsgálatára elméleti vizsgálatokat végeztek.
A gumikerék és a jármű interakciója
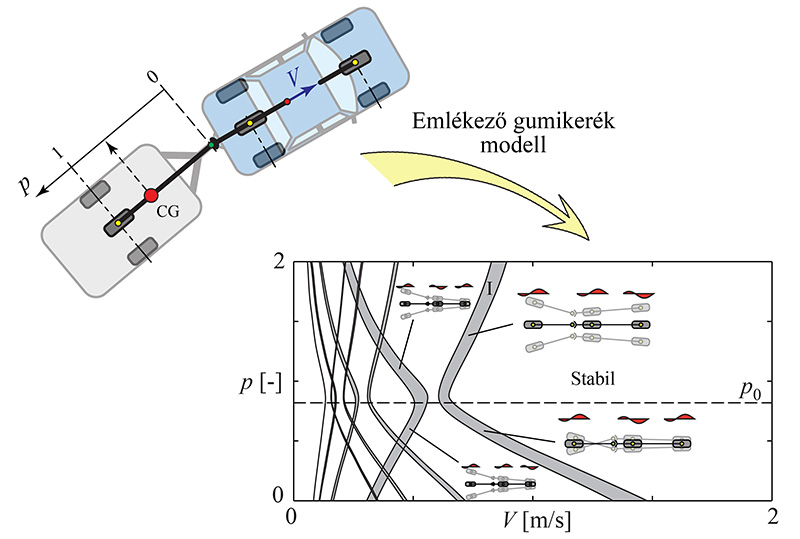
A Gépek és Járművek Dinamikája Kutatócsoportban a járművekhez és gumikerekekhez kapcsolódó kutatásoknak köszönhetően mind elméleti, mind gyakorlati úton igazolást nyert, hogy a gumikerék gördülése során a kerék mozgásával kapcsolatos információ tárolódik el a kerék-talaj érintkezési tartományban ahol az érintkező testek deformálódnak. Ez egy úgynevezett memóriahatást eredményez, amely bizonyos paraméterek esetén a jármű és/vagy a gumikerék rezgéseit okozhatja.